مشروع عرض الوقت علي شاشة ال سى دي باستخدام الاردوينو
تعمل الشاشة في احد الحالات التالية:
استقبال الأوامر من الأردوينو وتنفيذها، مثلا : أمر تهيئة ومسح الشاشة :
سيكون بهذا الشكل
سيكون بهذا الشكل
lcd.begin(16,2); lcd.clear();
استقبال المعلومات من الأردوينو وعرضها، مثلا : كتابة جملة معينة :
يمكنك استخدام هذا الامر بهذه الطريقة
يمكنك استخدام هذا الامر بهذه الطريقة
lcd.print("Hello");
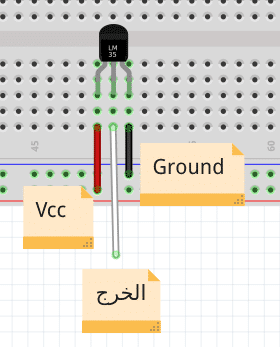
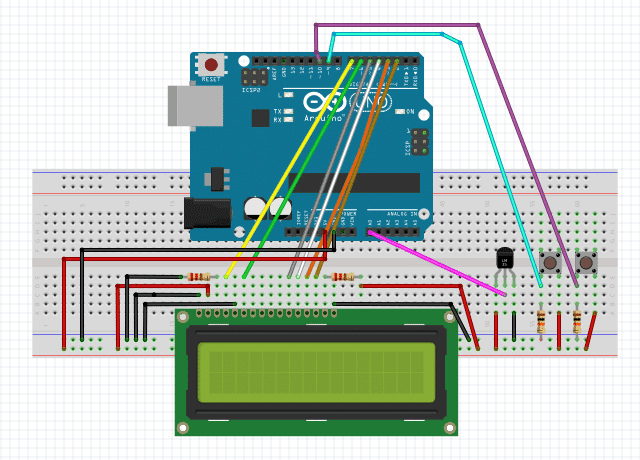
توصيل الدارة :
قم بتوصيل الدارة كما هو موضح بالصورة التالية :

سنقوم بعمل كود يقوم على حساب التوقيت لتعمل الساعة بشكل صحيح، حيث سيقوم بحساب مرور 60 ثانية ليقوم بزيادة عدد الدقائق وهكذا ايضا مع الساعات. سيتم استخدام مفاتيح الضغط ليقوم البرنامج بمراقبتها في البداية ليتم ضبط التوقيت الصحيح.

الكود البرمجي
قم برفع الكود التالي على الأردوينو :
#include <LiquidCrystal.h>
#define HOUR_BUTTON 6
#define MINUTE_BUTTON 7
#define TICK_LENGTH 60000
#define CHECK_TIME 250
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
unsigned int minute = 0;
unsigned int hour = 01;
unsigned long previousMillis = 0;
unsigned char am = 1;
void setup() {
// put your setup code here, to run once:
lcd.begin(16, 2);
pinMode(HOUR_BUTTON, INPUT);
pinMode(MINUTE_BUTTON, INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
checkTick();
lcd.setCursor(0,0);
lcd.print("Time:");
lcd.setCursor(6,1);
lcd.print(hour);
lcd.print(":");
lcd.print(minute);
if(am == 1) lcd.print(" AM");
else lcd.print(" PM");
}
void checkTick() {
unsigned long currentMillis = millis();
if ((unsigned long)(currentMillis - previousMillis) >= TICK_LENGTH) {
tick();
previousMillis = currentMillis;
}
if((unsigned long)(currentMillis - previousMillis) >= CHECK_TIME){
readHourButton();
readMinuteButton();
}
}
void tick() {
minuteUp();
}
void readHourButton() {
if (digitalRead(HOUR_BUTTON) == HIGH) {
delay(200);
hourUp();
}
}
void readMinuteButton() {
if (digitalRead(MINUTE_BUTTON) == HIGH) {
delay(200);
minuteUp();
}
}
void hourUp() {
hour = hour + 1;
if (hour > 12) {
lcd.clear();
hour = 1;
if(am == 1) am = 0;
else am = 1;
}
}
void minuteUp() {
minute = minute + 1;
if (minute > 59) {
minute = 0;
hourUp();
}
}
شرح الكود :
في البداية نقوم بإضافة مكتبة شاشة الـ LCD وتسمية منافذ الأردوينو المستخدمة مع مفاتيح الضبط :
#include <LiquidCrystal.h> #define HOUR_BUTTON 6 #define MINUTE_BUTTON 7
ثم نقوم نقوم بالإعلان عن بعض الثوابت التي سيتم استخدامها لاحقا :
#define TICK_LENGTH 60000 #define CHECK_TIME 250
بعد ذلك نقوم بالإعلان عن بعض المتغيرات. يستخدم المتغير minute لحفظ الدقائق. والمتغير hour لحفظ الساعات. والمتغير am لتسجيل ما إذا كان التوقيت صباحا أم مساءاً. وسيتم تسجيل الوقت الخاص بأخر مرة تم حساب التوقيت في المتغير previousMillis .
unsigned int minute = 0; unsigned int hour = 01; unsigned long previousMillis = 0; unsigned char am = 1;
في الدالة ()setup قمنا بضبط الاعدادات اللازمة للمشروع مثل ضبط ارجل الاردوينو كمخارج للمفاتيح وتشغيل الشاشة LCD :
void setup() {
// put your setup code here, to run once:
lcd.begin(16, 2);
pinMode(HOUR_BUTTON, INPUT);
pinMode(MINUTE_BUTTON, INPUT);
}
في الدلة ()loop، نقوم بحساب عدد الثوان التي مرت، فإذا كانت 60 ثانية نقوم بزيادة عدد الدقائق في المتغير minute. كما نقوم بإختبار الدقائق التي مرت، فعند مرور 60 دقيقة نقوم بزيادة عدد الساعات في المتغير hour. ثم نقوم بالنهاية بعرض الدقائق والساعات على شاشة الـ LCD.
أيضا اثناء الإختبار نقوم بإختبار المفاتيح إذا ما تم الضغط عليها ام لا عبر استدعاء الدالة ()checkTick . فإذا تم الضغط على مفتاح الدقائق نقوم بزيادة عدد الدقائق في المتغير minute، ويعمل بنفس الطريقة عند الضغط على مفتاح الساعات.
void loop() {
// put your main code here, to run repeatedly:
checkTick();
lcd.setCursor(0,0);
lcd.print("Time:");
lcd.setCursor(6,1);
lcd.print(hour);
lcd.print(":");
lcd.print(minute);
if(am == 1) lcd.print(" AM");
else lcd.print(" PM");
}
سنقوم بعمل عدد من الدوال المستخدمة في المشروع :
الدالة ()checkTick ، في كل مرة يتم استدعائها تقوم بحفظ الوقت الذي مضى منذ عمل Reset للأردوينو. ثم تتم مقارنة الوقت الحالي بقيمة مسبقة فإذا اصبح الفارق بين التوقيتين يتعدى الـ TICK_LENGTH الذي تم تحديده في أول البرنامج، فهذا يعني انه قد مرة دقيقة فنقوم بزيادتها بإستخدام الدالة ()tick. ثم نقوم بتسجيل هذا التوقيت لإستخدامه مرة ارخى لمعرفة هل مر دقيقة أخرى ام لا.
unsigned long currentMillis = millis();
if ((unsigned long)(currentMillis - previousMillis) >= TICK_LENGTH) {
tick();
previousMillis = currentMillis;
}
ايضا يتم التحقق ما إذا تعدى الفارق في التوقيت قيمة CHECK_TIME ، فعندها نقوم بقراءة المفاتيح المستخدمة في تعديل التوقيت.
if((unsigned long)(currentMillis - previousMillis) >= CHECK_TIME){
readHourButton();
readMinuteButton();
}
الدالة ()tick، تقوم بإستدعاء الدالة ()minuteUp، والتي بدورها تقوم بزيادة عداد الدقائق.
void tick() {
minuteUp();
}
الدالة ()readHourtButton تقوم بقراءة المفتاح الخاص بتعديل خانة الساعات فإذا تم الضغط عليه تقوم بتشغيل الدالة ()hourUp التي تقوم بزيادة عداد الساعات.
void readHourButton() {
if (digitalRead(HOUR_BUTTON) == HIGH) {
delay(200);
hourUp();
}
}
الدالة readMinuteButton() تقوم بقراءة المفتاح الخاص بتعديل خانة الدقائق فإذا تم الضغط عليه تقوم بإستدعاء دالة ()minuteUp التي تقوم بزيادة عداد الدقائق.
void readMinuteButton() {
if (digitalRead(MINUTE_BUTTON) == HIGH) {
delay(200);
minuteUp();
}
}
الدالة hourUp() في كل مرة يتم إستعداء هذه الدالة تقوم بزيادة عداد الساعات بمقدار واحد وعمل اختبار اذا كان التوقيت تغير من الصباح إلى المساء .
void hourUp() {
hour = hour + 1;
if (hour > 12) {
lcd.clear();
hour = 1;
if(am == 1) am = 0;
else am = 1;
}
}
الداله minuteUp() في كل مرة يتم إستدعائها تقوم بزيادة عداد الدقائق بمقدار واحد وعمل اختبار اذا وصل عداد الدقائق الى 60 تقوم بتصفير عداد الدقائق و زيادة عداد الساعات بمقدار واحد .
void minuteUp() {
minute = minute + 1;
if (minute > 59) {
minute = 0;
hourUp();
}
}